
티스토리 뷰

어떠한 경계 속도를 세울 때 파란색 선인 limit까지밖에 갈 수 없다.
그런데 우리가 도달 할 수 있는 거리가 멀어지게 되면, 최대 속도 때문에 시간을 길게 가져가야지만 최대 속도를 넘지 않는 범위에서 모든 경로 계획이 이루어진다.
특히나 먼 거리를 이동해야 하는 경우에는 비효율적인 경로 계획이 된다.
그렇기에 나온 게 리니어 세그먼트 with 파라볼릭 블렌드
trapezoidal trajectory(사다리꼴 경로)를 가지게 한다.
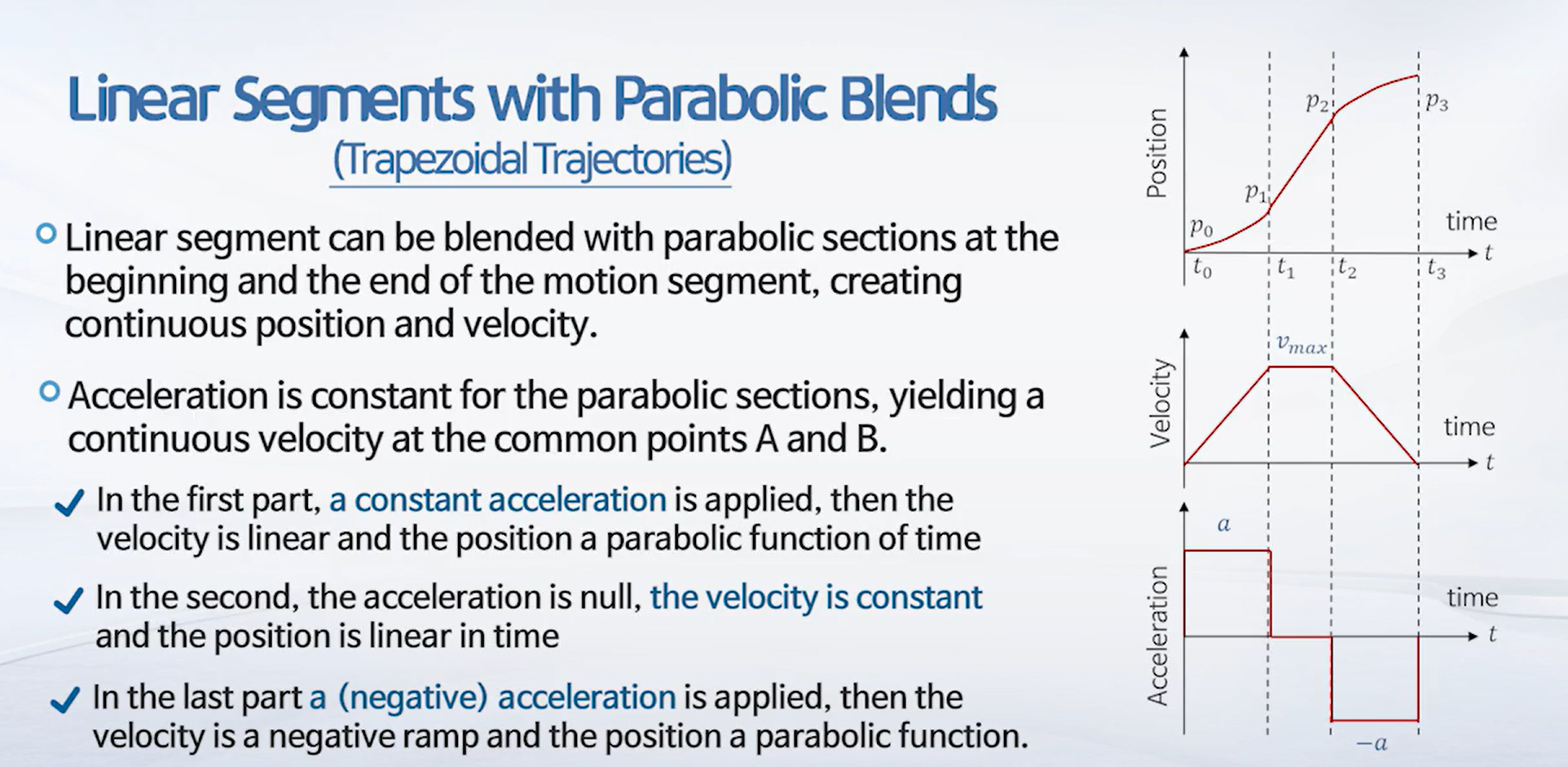
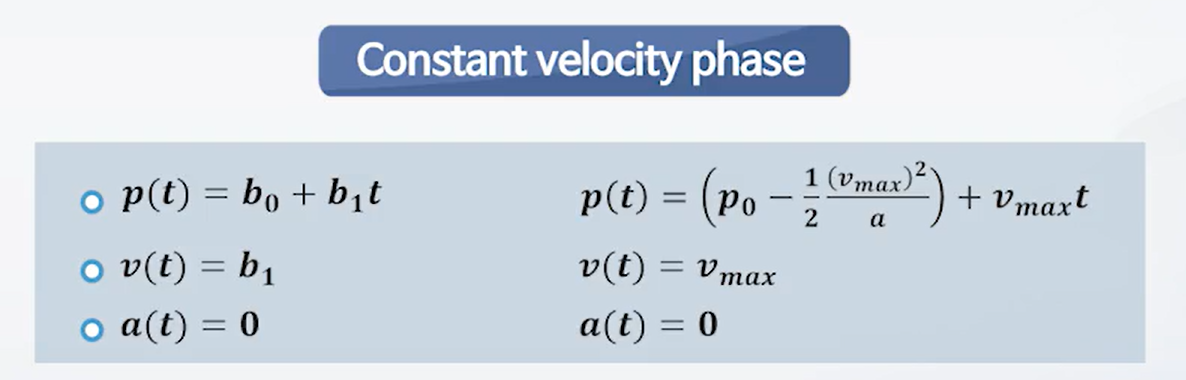
각각의 식을 다음과 같이 표현하게 된다.
가속 구간, 평 속도 구간, 감속 구간을 따로 해서 계산한다.


따라서 만약에 속도하고 최도속도를 알고 있고, 가속도하고 가속과 감속을 어떻게 할 것인지를 결정만 한다면, 이 식들에 의해서 알아서 마지막까지 언제쯤, 어떻게 끝자락에 도달하게 되는지에 대한 경로계획이 생겨난다.
시간을 우리가 세팅하지 않고, 최대 속도로 그 시간안에 도달할 수 있도록 하는 것이다.
경우에 따라서는 거리가 굉장히 짧을 때 등속 구간이 발생하지 않는 경우도 있다.
jerk -limited trajectory generation(s-curve) 방법
가속도가 너무 급작스럽게 변화하는 건 바람직하지 않다.
그렇기에 가속도도 부드러운 방식으로 만든다.
그래서 jerk(가속도의 변화량)을 constant로 유자하도록 만들어서, 가속도를 사다리꼴로 만든다.

기본적으로 총 7개의 구간으로 나뉘어져있다.
Vmax 구간을 기준으로 양 옆에 대칭을 이루는 관계이다.
jerk limited 또한, Vmax나 Amax에 도달하지 않는 경우가 있을 수 있다.
여기도 가속도가 변하는 구간, 3-2-3-1-3-2-3으로 polinomial의 차수가 blending 되어 있다.
이 S 커브 방법이 가장 popular한 방법이다.
그 다음으로는 4-3-4 trajectory polynomial. 3-5-3도 존재.
중간 중간 고려해야 할 것들을 전부 boundary condition을 이용해서 결정한다.

cubic spline interpolation
여러개의 점들을 지나가야 하는데, 부드럽게 하기 위해서 3차식으로 모든 경로를 일치시킨다.
CAD에서 뭔가 그릴 때 이런 식으로 사용한다.
