
티스토리 뷰
출처 : https://www.youtube.com/watch?v=8OFtHLaWXKY&t=5s
Manipulability란?
dexterity라고도 불린다.
어떤 nimbleness 를 적용하는 것이다. 어떠한 목적을 이루기 위해 로봇이 민첩성을 가져야 하는 걸 뜻한다.
예시로 들자면 인간의 다리가 완전히 곧게 뻗쳐있다면, 오히려 걸을 때 불편하다.
무릎이 굽혀져 있어야, 어느정도 중심을 잡을 수 있는 상태가 된다.
그리고 그 상태에서 가장 편안한 angle을 찾아야 한다. 그래야 다음 동작을 수행하기에 편하다.
로봇이 어떤 task를 수행할 때도 마찬가지이다. 어떠한 angle에서 해당 task를 수행하기에 가장 적합한가?
numerical answer를 찾는게 편할 것이다. 자코비안이 이것을 수행해준다.
Manipulability can be used as a criterion to select optimal postures, and even optimal link dimensions
Manipulability는 최적의 자세, 심지어 최적의 링크 치수를 선택하는 기준으로 사용될 수 있습니다.
가정
링크 2개에, 세타 1, 세타2와 end effector의 위치가 x1,x2로 주어져 있다고 하자.
그러면 x1,x2는 l1c1+l2c2, l1s1+l2s2로 기술될 수 있다.(좌표 평면에서 당연한 가정이다.)그래서 이를 각각 미분한다고 하면,
x1 dot, x2 dot 은 J(세타) * (세타1 dot, 세타2 dot)로서 기술된다.
즉, x dot은 J(세타) * 세타 dot으로 기술되는 것이다.
그러면 이는 좌표평면으로 기술했을 때, 세타1 dot과 세타 2dot으로 기술되는 좌표평면에서,x1 dot, x2 dot으로 바꾸는 좌표평면 변환이라고 할 수 있다.
그렇기에 세타 평면에 원을 그렸을 때, 각 사분면은 ,x 평면에 투영했을 때 찌그러지고, major axis와 minor axis가 결정된다.
이 그림이 가장 좋은 posture를 기술하는 데 있어서 가장 중요한 힌트가 된다.
만약 세타 dot의 제곱이 1이라고 하자. 그러면
만약에 J가 singular가 아니라면(determinant가 존재한다면)
세타 dot = J^-1 x dot 이다.
그렇기에 자코비안을 [(a,b),(c,d)]로 기술한다면, 공식은 다음과 같다.

이 방정식이 equation for ellipse이다.
이게 물리적으로 무슨 의미인지 보자.
velocity(세타 dot)의 amount 모두 같으나, x1,x2에서 나타나는 효과는 다르다.
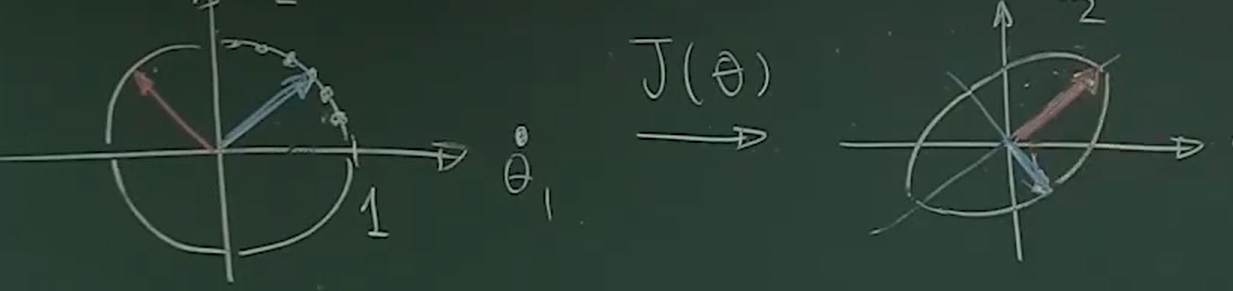
즉, same effort를 줌에도 ,파란 케이스 에서는 별로 못 움직이는 반면, 빨간 케이스에서는 많이 움직인다.
만약에 singularity 상태에 있다고 하자. 완전히 뻗힌 로봇 팔이 있다고 하자.
그러면 해당 end-effector는 팔이 뻗고 있는 방향과 수직으로는(정확히는 원형으로는) 쉽게 움직일 수 있으나, 뻗고 있는 방향으로는 더 이상 움직일 수 없고, 안쪽으로 바 굽히는 것도 마찬가지로 힘들어서 많이 움직일 수 없다.(revolute joint이므로)
따라서 best posture는, end-effector로부터 완벽한 원형을 형성한 범위에서 움직일 가장 좋게 된다.
왜냐하면 안쪽으로 굽히는 건 많이 움직일 수 없고, 수직으로 움직이는 건 많이 움직이기에, 균형을 맞추는 것.
General open chains
w,v = V라고 하자.
위에서 기술한 바와 같이 똑같이 V = J(세타) * 세타 dot
그러면 6차원 elipsoid(타원체)가 된다.
그러면 그 각각에 대해서 6차원 space에 귀결시킬수 있다.

다만 여기에는 조금 문제가 있는데, w와 v가 다른 물리적 단위를 가지고 있다는 것이다.
그래서 둘을 갈라놓고 싶다.
그러면 두 개의 diffrent equation으로 기술한다.
w = Jw(세타) 세타 dot
v = Jv(세타) 세타 dot
그러면 이제 타원체를 나눠서 기술할 수 있다.
또 한가지 문제가 있다면, v는 너무 단위가 많다.(m, cm, mile 등등)
이는 어떤 length의 scale에 영향을 받아 v에 영향을 미칠 수 있다.
그렇기에 이는 상황에 따라 봐가면서 결정해야 한다.